このソフトロボットアームは、ベイマックスの腕そのものだ(しかもディズニー製)

Disneyのベイマックス(原題:Big Hero 6)で活躍するチャーミングなロボット(ベイマックス)は、現実的な存在ではない。しかし、そのぷっくりとしたボディは、確実に成長しているソフトロボットの分野の例だ。そして今、ディズニー自身が、まるで映画から抜け出してきたプロトタイプであるかのような、ソフトなロボットアームを製作した。
ディズニーリサーチのロボットチームが作成したこの腕は、その膨らんだ姿や繊細なウインナーのような指、そして現在の状態や情報を近くの人に示すことのできる内部のプロジェクターなど、あきらかにベイマックスの影響を受けているように見える。
研究者たちはシステムを説明する論文の中に「人間とロボットの物理的な接触が考えられる場所では、人間の怪我やハードウェアの損傷を避けるために、ロボットは従順であると同時に、反応性を備えていなければならない」と書いている。「われわれの目標は、人間と物理的にやりとりしながら、オブジェクトを優しく扱うことのできる、ロボットアームとハンドシステムの実現である」。
 アームの機械部品はごく普通のものである。肘と手首があり、他の多くのロボットアームのように動作し、同様のサーボモーターを使っているといった具合だ。
アームの機械部品はごく普通のものである。肘と手首があり、他の多くのロボットアームのように動作し、同様のサーボモーターを使っているといった具合だ。
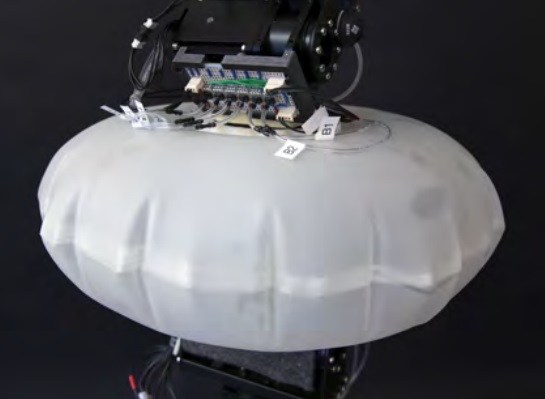 しかし関節の周りは大きな枕のように見えるもので覆われていて、研究者たちはこれを「力感知モジュール」(force sensing module)と呼んでいる。これは空気で満たされていて、それに加わる圧力を検出することができる。これには、サーボモーターを人間から保護し、また逆に人間をサーボモーターから保護するという二重の保護効果がある。また自然な接触相互作用を行うことも可能になる。
しかし関節の周りは大きな枕のように見えるもので覆われていて、研究者たちはこれを「力感知モジュール」(force sensing module)と呼んでいる。これは空気で満たされていて、それに加わる圧力を検出することができる。これには、サーボモーターを人間から保護し、また逆に人間をサーボモーターから保護するという二重の保護効果がある。また自然な接触相互作用を行うことも可能になる。
「ロボットのさまざまな関節上に個々のモジュールを配備することで、ロボットの広い範囲で接触した力を感知し、空間認識を実装することが可能になり、物理的な人間=ロボット相互作用が実現できる」と彼らは書いている。「個別の感知領域は、人間がロボットとコミュニケーションを行ったり、触ってその動きを導くことを可能にする」。
例えば研究者の一人がデモしている、ハグのようなことが可能になる:

この場合にはおそらく、このロボット(と、おそらくロボットの残りの部分)は、自分がハグされていることを理解し、同じ動作を返したり、他の動作を行ったりすることになるのだろう。
その指も柔らかく、中空構造になっている。これらは剛性材料と柔性材料の両方を利用することのできる3Dプリンタで作成されている。例えば膨張式の各指内の圧力センサは、1つの指先が強く押されていたり、全ての体重を支えているなどという情報を感知して、その情報をグリップの調整のためにロボットへ伝達する。
もちろんこれはまだプロトタイプに過ぎない。センサはまだ力の方向を検出することができず、材料や構造は気密を目指したものではないため、連続的にポンプで空気を注入しなければならない。しかしそれでも、それは研究者たちが見せたかったものを表現することに成功している。すなわち、従来の「ハード」なロボットが、ちょっとした創意工夫で「ソフト」なものに改造できるということを示しているのだ。ベイマックスを実現する道のりは遠いが、今はまだフィクションよりもサイエンスに近い段階なのだ。
[原文へ]
(翻訳:sako)
近日開催のイベント